

柯马机器人事业常用型号:
Racer7/1.4 对标ABB IRB 120、库卡KR6
NJ16/1.65 对标ABB 1200、 库卡KR10、KR20
NJ60/2.2 对标ABB 2600、4600、库卡KR70
NJ220/2.7 对标ABB 6700、库卡 KR210
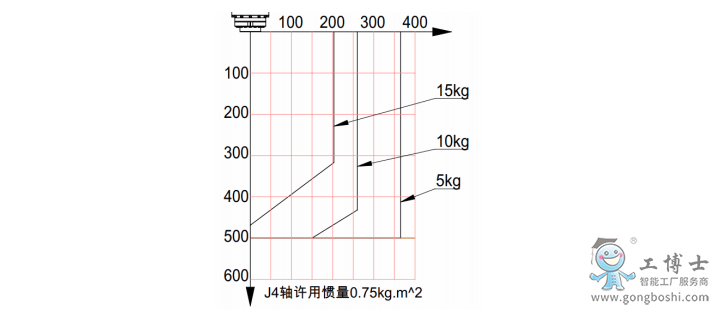
机器人的负载能力(包括手抓和焊枪等的质量),随机器人的型号而定。请严格遵守对机器人的负载力矩和负载惯量的限制。
以上内容来源于:网络
侵权删
更多机器人资讯请咨询:柯马机器人


 联系我们
联系我们

|
新闻中心 COMAU:机械臂手腕负载条件与末端法兰说明|柯马机器人
发布时间:2022-04-04 浏览次数:115 返回列表
工博士业务覆盖智能制造、人工智能、工业自动化供应链三大核心领域。公司在华中、华东、华北、华南、西南等主要城市成立分公司或办事处,建设工博士国际事业部,巩固发展了整体服务效能。
柯马机器人事业常用型号: Racer7/1.4 对标ABB IRB 120、库卡KR6 NJ16/1.65 对标ABB 1200、 库卡KR10、KR20 NJ60/2.2 对标ABB 2600、4600、库卡KR70 NJ220/2.7 对标ABB 6700、库卡 KR210 机器人的负载能力(包括手抓和焊枪等的质量),随机器人的型号而定。请严格遵守对机器人的负载力矩和负载惯量的限制。 以上内容来源于:网络 侵权删 更多机器人资讯请咨询:柯马机器人 |
联系热线:18621383601 联系人:石川 联系地址:上海市宝山区富联一路98弄6号
技术和报价服务:星期一至星期六8:00-22:00 柯马机器人系统服务商